

Tüm hareketler tekerleğe bindirildi. Direksiyon hareketi, aracın dört tekerleğinde de olabiliyor. Ön ve arka tekerlekleri ters yönlere doğru döndürüp aracın dar sokaklarda köşe dönmede kullanırsınız; park ederken tekerlekleri aynı yöne çevirip yengeç gibi yan yan gidersiniz…
Sürücüsüz arabaya geçişte önemli bir adım sayılır yeni tekerlek. Bizden birilerinin araç sürüşü için yazacağı yapay zekâ algoritmaları da, sürücüsüz taşıt yazılımları ile de Türkiye öne çıkabilir. En güvenlisini biz yazabiliriz. Yeter ki oyunun içinde kalalım; yeter ki, elimizde her istediğimizi icra edebilen bir araç platformu olsun. İşte bu patent o platformu sunmaya bir adım daha yaklaşıyor.
Genelde bilinen bir şeyi uzun uğraşlardan sonra bir de kendisi deneyerek öğrenen kişiler için kullanılır “tekerleği yeniden keşfetmek”. Ama, günümüzde, taşıtların elektronik yanı mekanik yanından baskın olmaya başlarken, yakıt olarak petrol türevleri terkedilip, enerji ihtiyacı için şarj edilebilir bataryalar devreye girer, araç elektrikli olurken, şu kağnı arabasından bugüne ufak evrimlerle gelmiş olan tekerleğe bir eğilmenin zamanıdır diye düşündüm.
Oturdum, tekerleği yeniden keşfettim. Patent başvuru numarası TR 2018/00596 oldu.
Önerdiğim büyüklükte bir değişikliği, geleneksel araç üreticilerinin mevcut fabrikalarında uygulaması pek kolay değil. Çünkü, o fabrikalarda geleneksel tekerlek ve aksamı, motor, vites kutusu, diferansiyel ve aktarma organlarına yapılmış olan yatırımlar var ve bu yatırım geri kazanılmadan bunlardan çıkmak, zarar etmek demek. Ama, söz gelişi beş babayiğitin yapacağı gibi yeni kurulacak ve bu tür “yatırım ayak bağı” olmayan fabrikalarda uygulanırsa, bir atılım, bir sıçrama, bir öne geçiş anlamına gelebilir.
Patent, bir kavramı, yöntemi ortaya koyar. Patentlerde ölçü, sayı bulunmaz. Bir uygulama için bu yöntemin bir tasarımda kullanılması gerekir. Kuşkusuz, patent başvurusu henüz kabul edilmiş bir yöntemin bir fabrikada uygulamaya konulması için, seneler süren tasarımlar, deneyler, iyileştirmeler ve sertifikasyonlar gerekir. Ama, eğer sıfırdan bir taşıt tasarlayacaksanız, tüm bunlara vakit vardır. Jan Nahum’un 6-7 sene süresini telaffuz etmesi, sanırım bu nedenledir.
Elektrik motorlu araçlarda merkezi bir yerde bir motor bulundurup, bunun ürettiği mekanik gücü bir dizi aktarma organı ile tekerleklere ulaştırmak hem pahalı, hem de enerji kayıplı bir yöntemdir.
Tüm hareketler tekerleğe
Senelerdir motoru tekerleğin bir parçası yapmayı hedefleyen birçok buluş, uygulama yapılmıştır. Bir kısmı elektrikli motosikletlerde kullanılmaktadır. Motorun yeteneği uygunsa, bir “vites kutusu” kullanmaya da gerek kalmamaktadır. Ayrıca, her tekerleğe bir motor konulduğunda, bunların üreteceği güç elektronik yolla kontrol edilerek, virajlarda dışta kalan tekerleğin içtekine göre daha fazla yol alması dengesizliğini gideren diferansiyelin de görevi üstlenilmiş olmaktadır. Elektrikli araçlarda da bunların uygulanmış olma olasılığı çok yüksektir.
Aracın çukur ve tümsek atlama (süspansiyon), bu sırada oluşacak salınmayı sönümlendirme (amortisör), aracın yönlendirmesi için tekerleğin sağa sola hareketi (direksiyon), ve dönüşlerde tekerleğin içe dışa yatmasını sağlayan tüm hareketleri için gereken mekanizmayı da tekerleğin içine yerleştirmek olası. Ancak geleneksel yolla değil, yepyeni bir yaklaşımla. Sözünü ettiğim patent başvurusu da bunu elde etmek için. Şöyle:
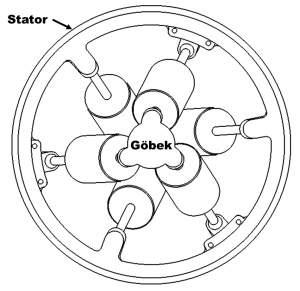
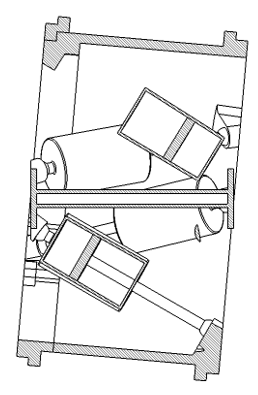
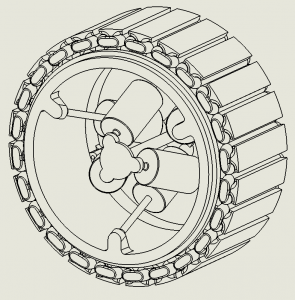
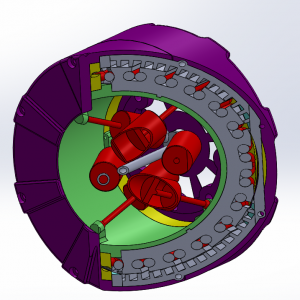
Tekerleğin göbeğini oluşturan ve onu aracın gövdesine bağlayan bir çubuk düşünün (Göbek). Bunu dönmeyecek şekilde aracın gövdesine bağlayın. Geometriden hatırlayacağınız bir kural vardır: üç nokta bir düzlemi belirler, tamamen, eksiksiz olarak tanımlar. Bu göbeğin iç tarafında olan yüzüne üç; dış taraftaki yüzüne de üç, altı tane hidrolik silindir bağlayın. Bağlantıları, küresel olarak hareket edebilir olsun. Silindirlerin pistonlarını da motorun duran kısmınım (Stator) üzerinde gene küresel olarak hareket edebilen mafsallarla karşı yüzlere monte edin. Göbeğin iç yüzündeki silindirin pistonu statorun dış yüzüne; göbeğin dış yüzündeki silindirin pistonu statorun iç yüzüne gelecek şekilde, çapraz. Böylece silindirlerin yükleri karşılaması daha kolay oluyor.
Bu yerleştirme kesitte daha açık görülebilir:
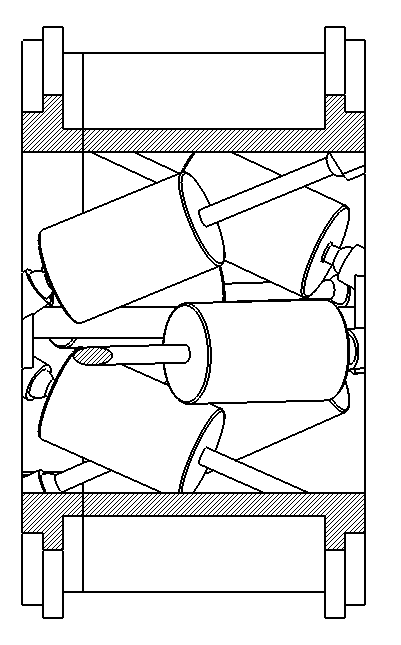
Stator da göbek de dönmeyen parçalar. Statorun dönmemesini bu 6 piston sağlıyor. İlk resme dikkat ederseniz, silindirin göbeğe bağlı olduğu yer ile pistonunun statora bağlı olduğu yer aynı hizada değil, stator saat yönüne doğru hafifçe dönük. Statorun, üzerine bağlanacak rotorun (motorun diğer parçası), jant ve lastiğin dönme hareketlerine karşı durabilmesi, bu dönüklük sâyesinde daha kolay oluyor.
Silindirlerden bir kısmındaki hidroliği boşaltsanız, diğerlerine de hidrolik doldursanız, göbek ile stator eksenleri arasındaki mesafeyi, bunlar paralel kalsalar da değiştirebiliyorsunuz. Bu hareket, bir tümseğin üzerinden atlarken, veya bir çukura düşerken, tekerleğin düşey yönde hareket edebilmesini, bu yolla süspansiyon görevini yerine getirmesini sağlıyor.
Elbette, bu sırada hidrolik akışını elektronik yolla kontrol ederek aracın zıplamasını, zıpladıktan sonra da mekanik sistemlerde amortisörün yaptığı gibi salınmasını engellemek de mümkün oluyor. Dahası, bozuk bir yolda giderken tüm tekerlekleri aşağı doğru bastırıp aracı yukarı kaldırmak, aracın altının engellere vurmasını önlemek de mümkün oluyor. Benzer şekilde otoyolda giderken aracı yola mümkün olduğunca yaklaştırıp, rüzgar direncini azaltmak da. Her şey elektronik kontrolle yönetiliyor.
Silindirlere verilecek hidrolik miktarını gene elektronik kontrolle düzenlediğinizde, göbek ile statorun eksen açılarını da bir diğerine göre şaşırtabiliyorsunuz. Bu size direksiyon işlevini veriyor. Aşağı yukarı süspansiyon hareketi ile bu hareket birlikte yapılabiliyor, biri diğerine engel değil. Diyelim sağ tekerlek, dış yüzde statoru geriye doğru, iç yüzde statoru ileriye doğru ittiğinizde, tekerlek sağa dönmüş oluyor.
Her hareket hidrolik akışını denetleyen elektronik kontrol devreleri ve silindir-pistonlar tarafından yapılıyor. Direksiyon hareketi, aracın dört tekerleğinde de olabiliyor. Bunu, ön ve arka tekerlekleri ters yönlere doğru döndürüp aracın dar sokaklarda köşe dönme olanağını artırıcı kılmakta da kullanabiliyorsunuz; park ederken tekerlekleri aynı yöne çevirip, yengeç gibi yan yan gitmeyi de sağlayabiliyorsunuz. Bu yan yan gitme, yüksek hızda şerit değiştirirken savrulmayı azaltıcı bir etki de sağlıyor.
Araç virajdayken tekerleklerin içeri veya dışarı yatırılması da söz konusu. Dışa yatırmak için, statorun iç yüzünü yukarı, dış yüzünü aşağı indirdiğinizde yatma işlemi de olmuş oluyor. Aslında bu hareket, üstten bakılınca direksiyon hareketi ile özdeş. Bakış noktanızı döndürüp tekerleğe önden baksanız, direksiyon hareketinin aynısı, içe-dışa yatma olarak karşınıza çıkıyor.
Vites, diferansiyel, kaymaya karşı yarı kilitli ya da tam kilitli diferansiyel, yük dağılım kontrolü, frenleme, frenleme sırasında elde edilecek enerji ile bataryanın şarjı, aracın hızlandırılması gibi işlevler; buna ek olarak aklınıza gelecek çoğu üç harf kısaltmasıyla anılan sürüş güvenliği unsurları da her tekerlekte yer alan elektrik motorlarının bir merkezden denetimi ile elde ediliyor.
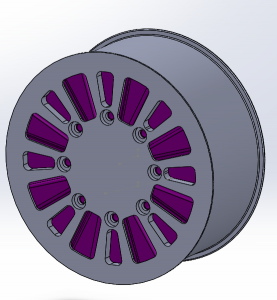
Birçok örneği yapılmış olduğu için patent dışında tutulan motor, resimdeki gibi düşünülebilir: önce stator kısmı (yukarıdaki “Stator”un üzerine eklenmiş olarak). Burada sargılar var, bunlara elektrik bağlantıları olacak, statorun dönmemesi, doğrudan tel ile bağlantı olanağı sağlıyor.
Ardından rotor kısmı, burada sabit mıknatıslar yer alıyor.
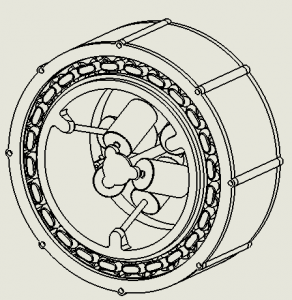
Ve nihayet motoru ve rulmanları bir arada tutan kapakları ve jantı ile size 17×7,5J bir tekerlek:
Türkiye nasıl yararlanır?
Gelelim bu yaklaşımın önemine: Süspansiyon ve direksiyon ile bunlara bağlı diğer sürüş güvenliği unsurlarının tümünün elektronik kontrol ile kurgulanabilir noktaya ulaşması, sürücüye bırakılmış, ya da mevcut sistemlerde olanaksız olan birçok kontrolün, aracın sürüş bilgisayarına geçmesine olanak sağlıyor.
Kısaca, bu tür araçları kullanmak daha kolaylaşıyor, kazalara neden olabilecek sürücü hataları da azalıyor. Dahası, “sürücüsüz taşıt” kavramına bir adım daha yaklaşan, bunun üzerinde kurulmasına daha uygun bir platform oluşturuyor. Mevcut sistemde olanaksız olan bir husus, araç tekerleklerinin virajlarda içe / dışa yatırılması, hıza bağlı olarak değişken kılınabilir. Bu, bu tekerlekte, artık yazılımın bir işlevi oluyor.
Türkiye bundan nasıl yararlanabilir? Niyet var, beş babayiğit bir araya geldiler, yerli bir araç tasarlayacaklar, bunu yapacak fabrikayı kuracaklar. Bu aracı, süspansiyon ve direksiyon sistemi geleneksel olmayan, bilgisayar kontrolüne uygun olan bu yöntemle yapmaya karar verseler, bu “Türk markası” aracın, dünya pazarlarında öne çıkması için bir basamak yakalamış olabilirler. Peşlerinde sürükledikleri, çok sayıda üreterek yapılan yatırımı geri kazanmak zorunda oldukları bir yatırımları da bulunmadığına göre, bu yönteme geçişin bir maliyeti yok.
Sürücüsüz taşıt yazılımı
Birçok ülkeden daha iyiyiz ama, Türkiye’de trafik kurallarına pek uyulmaz. Bu nedenle Türkiye’de sürücü olmak, Türk yollarında araç kullanmak, sürücülerin kurallara daha sıkı uyduğu ülkelere göre daha zordur. Karşınızda araç kullananların beklenmedik hareketlerine karşı, “öğrenilmiş” bir dizi ek tepki, önlem bilmek, uygulamak zorundasınızdır. Doğal zekâmız, birikimimiz, bu olanağı bize sağlıyor. Bizden birilerinin araç sürüşü için yazacağı yapay zekâ algoritmaları da, bu birikimi dikkate alırsak, gelişmiş ülkelerde yazılacaklara göre daha fazla beklenmedik durum karşısında ne yapacağını bilen sürücüsüz taşıt yazılımları ile sonuçlanacaktır.
En güvenlisini biz yazabiliriz. Yeter ki gevşek davranmayalım, oyunun içinde kalalım; yeter ki, elimizde her istediğimizi icra edebilen bir araç platformu olsun. İşte bu patent o platformu sunmaya bir adım daha yaklaşıyor.
Ali Akurgal
*Bu yazı HBT’nin 96. sayısında yayınlanmıştır.